




Activities
2021年7 月 24 日-25 日,中國自動化學會青年菁英系列活動(長三角地區(qū))將于在上海市舉行,本次論壇采取線上+線下方式進行。精彩報告,敬請關注!
歡迎掃描下方二維碼加入釘釘“CAA YeS九州同歡慶直播群”觀看直播!

一、 活動名稱
中國自動化學會青年菁英系列活動(長三角地區(qū))
二、時間地點
時間:2021年7 月 24 日-25 日
地點:上海錦豐國際大酒店(松江店)
三、組織機構(gòu)
主辦單位:
中國自動化學會
承辦單位:
同濟大學電子與信息工程學院
同濟大學上海自主智能無人系統(tǒng)科學中心
中國自動化學會集成自動化專業(yè)委員會
論壇主席:
洪奕光
論壇組織主席:
雷金龍
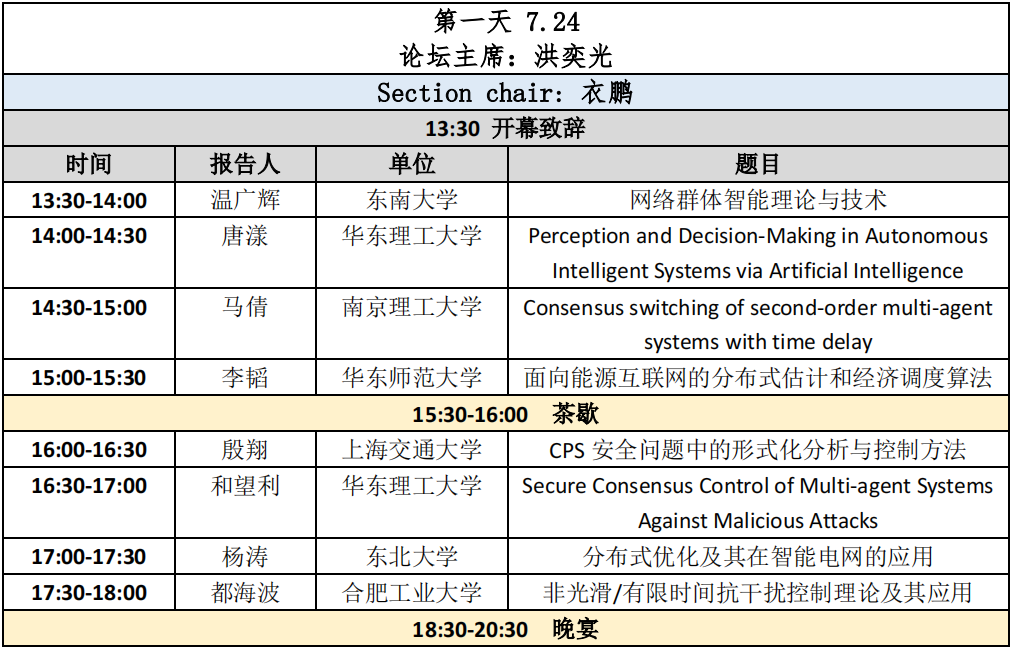
四、會議日程
五、論壇主席
Yiguang Hong is a professor at the Department of Control Science and Engineering, Tongji University, Shanghai, China. He received the B.S. and M.S. degrees from Peking University in 1987 and 1990, respectively, and the Ph.D. degree from CAS in 1993. He is a vice president of the Technical Committee on Control Theory of the Chinese Automation Association, which organizes the Chinese Control Conference each year. His research interests are in nonlinear control, distributed optimization and control, software reliability, automata, and artificial intelligence. He has served as an associate editor of many journals, including IEEE Transactions on Automatic Control, and currently is the editor-in-chief of Control Theory and Technology and an associate editor of CSM and IEEE Transactions on Control of Network Systems. He is the author of more than 200 journal and proceedings papers. Among his honors are the Young Author Prize of the International Federation of Automatic Control (IFAC) World Congress, Youth Award of Science and Technology of China, and the State Natural Science Prize of China
六、論壇組織主席

Jinlong Lei is a research professor at the Department of Control Science and Engineering, Tongji University, Shanghai, China. She received the B.E. degree in automation from the University of Science and Technology of China, Hefei, China, in 2011, and the Ph.D. degree in operations research and cybernetics from the Institute of Systems Science, Academy of Mathematics and Systems Science, Chinese Academy of Sciences, Beijing, China, in 2016. She was a postdoctoral fellow with the Department of Industrial and Manufacturing Engineering, Pennsylvania State University from 2016 to 2019. Her research interests include stochastic approximation, stochastic and distributed optimization, and network games under uncertainty.
七、報告及報告人簡介
7月24日

溫廣輝
東南大學
教授
報告題目:網(wǎng)絡群體智能理論與技術(shù)
報告時間:13:30-14:00,7.24
報告簡介:
從鳥類群集、魚群蜂擁等自然界中美妙的群體現(xiàn)象出發(fā),引出群體智能及其所蘊含的分布式協(xié)同思想;在此基礎上介紹在新一代人工智能研究背景下,網(wǎng)絡群體智能理論與技術(shù)的研究內(nèi)涵和外延,著重介紹其研究內(nèi)涵的深刻性和外延的廣泛性,以及超越分布式協(xié)同框架的研究特點;并進一步分享一些關于切換拓撲下群體智能系統(tǒng)協(xié)同一致性的研究成果,以及相關理論成果在水面無人艇和多旋翼無人機集群系統(tǒng)協(xié)同編隊控制中的典型工程應用。最后,展望了在新一代人工智能研究背景下,網(wǎng)絡群體智能理論與技術(shù)的一些研究課題。
報告人簡介:
溫廣輝,教授,博士生導師(數(shù)學,網(wǎng)絡空間安全),國家優(yōu)秀青年基金獲得者(2017),IET Fellow。2012年獲北京大學博士學位;2009 年至 2012 年期間,先后 4 次訪問香港城市大學電子工程系;2012 年 7 月至 9 月,在中國科學院系統(tǒng)科學研究所訪問;2012 年 9 月至 2013 年 1 月,任澳大利亞新南威爾士大學 Research Associate;2014 年 1 月至 2 月,任香港大學 Visiting Research Fellow,2013 年 1 月至今,在東南大學任教。擔任 IEEE J. Emerging and Selected Topics in Industrial Electronics; IEEE Trans. Systems, Man, and Cybernetics: Systems; IEEE Open J. Industrial Electronics Society; Asian J. Control 和 Robotics 編委,中國工業(yè)與應用數(shù)學學會復雜系統(tǒng)與復雜網(wǎng)絡專委會委員,中國指揮與控制學會網(wǎng)絡科學與工程專委會委員,中國自動化學會環(huán)境感知與保護自動化專業(yè)委員會委員,IEEE Senior Member;擔任國際 10 余個 IEEE Trans. 期刊審稿人、5 個國際 SCI 期刊客座編輯,3 個國際期刊客座主編。國家自然基金委、澳大利亞研究理事會、瑞士國家科學基金會項目通訊評議專家。主持國家自然科學基金 4 項,江蘇省自然科學基金 2 項,教育部博士點基金新教師項目 1 項;作為骨干成員參加國家重點研發(fā)計劃重點專項 1 項,國家自然基金重點基金 1 項。獲中國指揮與控制學會科學技術(shù)獎一等獎一項(排名第 2),2018 年澳大利亞 ARC Decra Fellow, 2019 年亞太神經(jīng)網(wǎng)絡學會青年研究獎(獨立),2020 年中國指揮與控制學會青年科學家獎(獨立)。

唐漾
華東理工大學
教授
報告題目:Perception and Decision-Making in Autonomous Intelligent Systems via Artificial Intelligence
報告時間:14:00-14:30,7.24
報告簡介:
In this talk, we will review our recent advances in perception and decision-making in autonomous intelligent systems. We will first report our results in unsupervised depth estimation via deep learning in dynamic environment. Then, we will show our results adapted to different extreme conditions like night, rainy night and snow days. After giving our results in perception of complex environment, we will also present our results in decision-making of UAV for aggressive flight and collision avoidance. Finally, some concluding remarks will be provided.
報告人簡介:
唐漾,博士,教授,博士生導師,德國洪堡基金、國家級高層次人才、科技部中青年科技創(chuàng)新領軍人才、國家級海外高層次人才引進計劃青年項目和上海市優(yōu)秀學術(shù)帶頭人等計劃入選者, ESI 全球高被引科學家。主要研究多智能體系統(tǒng)/復雜網(wǎng)絡狀態(tài)估計、控制和優(yōu)化,自主群體智能系統(tǒng)感知和決策,機器視覺與深度學習,信息物理融合系統(tǒng)安全分析與控制,以及過程系統(tǒng)風險預警和應急輔助決策。圍繞上述領域,在 Nature 子刊、Cell 子刊、Automatica 和 IEEE 匯刊上發(fā)表論文 80 余篇,申請/公開/授權(quán)專利 8 件。目前擔任 Nature 出版集團 Scientific Reports 資深編委,IEEE Transactions on Neural Networks and Learning Systems, IEEE Transactions on Circuits and Systems I: Regular Papers, IEEE Transactions on Emerging Topics in Computational Intelligence, IEEE Systems Journal 等多個 SCI 期刊的副主編/編委。獲得 2019 年度上海市自然科學獎一等獎(第一完成人)。
馬倩
南京理工大學
教授
報告題目:Consensus switching of second-order multi-agent systems with time delay
報告時間:14:30-15:00,7.24
報告簡介:
Consensus problem of Multi-agent systems has attracted considerable attention recently. The consensus problem becomes more complicated if more complex dynamics are considered, such as agents with time delay. A novel PI type controller with input delay is proposed. The fact that the consensus switching of systems with the continuous change of input delay is first revealed. If the rightward crossing condition holds, the delay margin can be obtained to guarantee that the systems reach consensus if and only if the time delay is less than the critical value. Otherwise, it is possible that the systems switch from consensus to non-consensus and back to consensus as the delay increases.
報告人簡介:
馬倩,南京理工大學自動化學院教授、博士生導師。2013 年 4 月畢業(yè)于南京理工大學自動化學院,獲控制理論與控制工程專業(yè)工學博士學位。曾先后在香港城市大學、美國加州大學河濱分校、美國南伊利諾伊大學從事訪問研究工作。獲國家自然科學二等獎、教育部自然科學一等獎。入選江蘇省“六大人才高峰”高層次人才項目,獲江蘇省杰出青年基金資助。研究方向為時滯系統(tǒng)的穩(wěn)定性分析、多智能體系統(tǒng)分布式協(xié)調(diào)控制、非線性系統(tǒng)分析和控制。

李韜
華東師范大學
教授
報告題目:面向能源互聯(lián)網(wǎng)的分布式估計和經(jīng)濟調(diào)度算法
報告時間:15:00-15:30,7.24
報告簡介:
研究了面向能源互聯(lián)網(wǎng)能量管理的分布式估計和經(jīng)濟調(diào)度算法。針對帶有隨機網(wǎng)絡圖、時變通信延時和觀測矩陣的分布式在線參數(shù)估計算法,發(fā)展了隨機概率矩陣連乘積的分段二項展開方法和采用延時矩陣的隨機延時建模方法,得到了保證算法均方和幾乎必然收斂的“隨機時空持續(xù)激勵條件”。提出了基于多自主體協(xié)同控制的能源互聯(lián)網(wǎng)全分布式經(jīng)濟調(diào)度算法。每個節(jié)點的智能控制單元一方面通過領導者-跟隨者算法對能源路由器獲得的配電系統(tǒng)成本電價進行估計;另一方面,基于改進的分布式平均算法對所有總線節(jié)點的平均功率不匹配值進行迭代估計。算法是全分布式的,每個節(jié)點都基于本地狀態(tài)信息及與相鄰節(jié)點通信所獲得的信息來操作,眾多不與能源路由器直接相連的節(jié)點不需要知道整個微電網(wǎng)的運行狀態(tài),就可以在孤島和并網(wǎng)兩種運行狀態(tài)間平滑轉(zhuǎn)換。
報告人簡介:
李韜,上海市東方學者特聘教授,華東師范大學數(shù)學科學學院教授、智能數(shù)學系主任,上海國家應用數(shù)學中心隨機控制與信息-物理-能源系統(tǒng)研究團隊負責人。主要研究方向為隨機控制、分布式學習、控制與博弈。曾主持國家自然科學基金優(yōu)秀青年科學基金。曾獲第 7 屆亞洲控制會議最佳論文、第 28 屆張嗣瀛優(yōu)秀青年論文、中國自動化學會 2017 自然科學二等獎、第 17 屆 IFAC 青年作者獎榮譽提名(五篇之一)、2015《中國科學:信息科學》五年高引論文等。目前擔任 Systems and Control Letters、IFAC Nonlinear Analysis:Hybrid Systems、IEEE Control Systems Letters、SCIENCE CHINAInformation Sciences 等期刊的責任編委, 曾獲《中國科學:信息科學》2018 年度突出貢獻編委獎。
殷翔
上海交通大學
副教授
報告題目:CPS 安全問題中的形式化分析與控制方法
報告時間:16:00-16:30,7.24
報告簡介:
信息物理系統(tǒng)(CPS)是集控制、通訊與計算于一體的復雜智能系統(tǒng),其理論架構(gòu)廣泛應運用能源、交通、智能制造等關鍵基礎設施,CPS 安全問題在近年來得到了學術(shù)界的廣泛關注。本報告首先介紹了基于形式化方法的 CPS 安全分析與控制的基本思想;在此基礎上,針對 CPS 控制器中的復雜邏輯功能安全要求,介紹了基于監(jiān)控理論的安全控制器設計方法;最后,針對 CPS 中的信息安全與惡意入侵問題,進一步介紹了基于形式化方法的動態(tài)系統(tǒng)機密防護與入侵檢測算法。
報告人簡介:
殷翔,上海交通大學自動化系副教授,博士生導師。2012 年本科畢業(yè)于浙江大學電氣工程學院,2017 年于美國密西根大學 EECS 系獲得博士學位。現(xiàn)任 IEEE 控制系統(tǒng)協(xié)會-離散事件系統(tǒng)委員會共同主席。主要從事信息物理系統(tǒng)的分析與控制、工業(yè)控制系統(tǒng)安全防護與故障診斷、形式化方法等領域研究。近五年在 IEEE TAC 和 Automatica 兩刊發(fā)表論文三十余篇。曾獲 IEEE CDC 最佳論文提名獎等榮譽。

和望利
華東理工大學
教授
報告題目:Secure Consensus Control of Multi-agent Systems Against Malicious Attacks
報告時間:16:30-17:00,7.24
報告簡介:
Multi-agent systems (MASs) provide an effective means for coordinating a large number of spatially distributed and networked agents such that the desired cooperative tasks can be accomplished with promising reliability, manipulability, scalability, and efficiency. One core issue in the study of MASs is the distributed control protocol design that depends on the local and real-time information exchanges among interacting agents over networks to achieve the anticipated cooperative control objectives. However, network-enabled information sharing and increasing connectivity in practical MASs present several attack factors for malicious adversaries, thereby rendering secure control of MASs fundamentally significant. This talk will address secure consensus of multi-agent systems under deception attacks, which occur in sensor-to-controller channels or controller-to-actuator channels. The characteristic of the attack sequence is described, and the effect of attacks on consensus is analyzed.
報告人簡介:
和望利,華東理工大學教授,博士生導師,國家優(yōu)秀青年科學基金項目,中國科協(xié)“青年人才托舉工程”、上海市青年科技啟明星計劃獲得者。主要研究興趣包括多智能體分布式協(xié)同控制與優(yōu)化、信息物理網(wǎng)絡系統(tǒng)安全分析與彈性控制;多機器人/車輛分布式感知與協(xié)同決策等。受邀出訪澳大利亞中昆士蘭大學、香港大學機械工程系、香港城市大學混沌與復雜網(wǎng)絡中心、德國波茨坦氣候影響研究所、日本首都大學東京從事訪問研究。在IEEE匯刊重要學術(shù)刊物和會議上發(fā)表 80 多篇學術(shù)論文,主持國家重點研發(fā)計劃子課題、國家自然科學基金等 10 余項,曾擔任 IEEE 工業(yè)電子學會網(wǎng)絡控制系統(tǒng)與應用專業(yè)委員會主席(2018-2019)、首都大學東京客座副教授(2015-2017),第三屆先進計算智能和智能信息國際研討會的出版主席、IEEE 工業(yè)電子學會旗艦會議 2018ISIE、2019ICIT 分組程序委員會主席。目前為 IEEE 資深會員,IEEE Trans. Neural Networks and Learning Systems 等副主編。榮獲上海市自然科學獎一等獎(排名二)和第六屆中國自動化學會青年科學家獎。

楊濤
東北大學
教授
報告題目:分布式優(yōu)化及其在智能電網(wǎng)的應用
報告時間:17:00-17:30,7.24
報告簡介:
分布式優(yōu)化算法通過多智能體之間的相互合作協(xié)調(diào)來解決大規(guī)模的優(yōu)化問題。與傳統(tǒng)的集中式優(yōu)化算法相比,分布式優(yōu)化算法更為靈活、方便、高效。分布式優(yōu)化算法在電力系統(tǒng)、交通系統(tǒng)、信息物理系統(tǒng)等領域有廣泛應用。本報告首先回顧和總結(jié)現(xiàn)有的分布式優(yōu)化算法;接下來,針對智能電網(wǎng)中分布式能源的最優(yōu)協(xié)同控制問題,提出兩種分布式協(xié)同優(yōu)化算法,并嚴格理論證明了算法的收斂性,同時在典型的 IEEE-39 節(jié)點系統(tǒng)中進行了驗證。
報告人簡介:
楊濤,東北大學教授、博士生導師。2012年獲美國華盛頓州立大學博士學位;2012至2014年在瑞典皇家理工學院仼職博士后;2014至2016年在美國太平洋西北國家實驗室先仼職博士后,后晉升為Scientist;2016至2019年在美國北德克薩斯州大學仼助理教 授;2019年入選國家青年高層次人才類項目,加入東北大學流程工業(yè)綜合自動化國家重點實驗室。主要從事工業(yè)人工智能、智能優(yōu)化與控制一體化、信息物理系統(tǒng)、分布式協(xié)同控制和優(yōu)化等領域的研究,主持國家自然基金重大項目課題等。在國際權(quán)威期刊和學術(shù)會議上發(fā)表論文80多篇,其中IEEE匯刊和IFAC會刊論文20多篇。現(xiàn)任《自動化學報》副主編、《IEEE Transactions on Control Systems Technology》《IEEE/CAA Journal of Automatica Sinica》等期刊編委(Associated editor),IEEE控制系統(tǒng)協(xié)會和 IFAC多個技術(shù)委員會委員。曾任Annual Reviews in Control等多個雜志客座編委。2018 年獲美國橡樹嶺大學聯(lián)盟Ralph E Powe青年教授獎;作為導師獲第14屆IEEE International Conference on Control and Automation國際會議最佳學生論文獎。
都海波
合肥工業(yè)大學
教授
報告題目:非光滑/有限時間抗干擾控制理論及其應用
報告時間:17:30-18:00,7.24
報告簡介:
本報告主要介紹非光滑/有限時間抗干擾控制理論及離散非光滑控制最新一些進展。非光滑/有限時間控制理論由于在收斂性能、抗干擾性能等方面的優(yōu)勢,長期得到了控制理論界和工程界的關注。傳統(tǒng)非光滑/有限時間控理論研究主要集中在如何分析和設計連續(xù)時間形式的控制器。但是在實際應用中,越來越多的系統(tǒng)是基于計算機控制。因此,分析、設計和實現(xiàn)離散非光滑控制系統(tǒng)對非光滑控制工程化實現(xiàn)具有重要意義。本報告重點主要介紹近期報告人如何把采樣控制理論思想和非光滑控制理論有機融合起來,提出了適合離散非光滑控制系統(tǒng)分析和設計的相關一些工具,從而解決了離散非光滑控制中的部分理論問題。最后,本報告將介紹在非光滑控制應用方面取得的一些成果。
報告人簡介:
都海波,合肥工業(yè)大學電氣與自動化工程學院教授,博導,自動化系主任,控制理論與控制工程學科點負責人,校學術(shù)委員會委員,一直從事非線性控制基礎理論和應用的研究,先后主持國防創(chuàng)新特區(qū)項目1 項,國家自然科學基金項目 3 項,省部級項目 5 項,主研企業(yè)委托類項目 3 項。發(fā)表 SCI 論文 70 余篇,其中 TAC 和 Automatica 13 篇,SCI 他引超過 3500 次,10 篇 ESI 高被引論文,入選 2020 年愛思唯爾中國高被引學者。
研究成果先后獲安徽省自然科學二等獎(排名第 1)、教育部自然科學二等獎(排名第4),安徽省自然科學優(yōu)秀學術(shù)論文一等獎,Automatica 最佳引用論文 1 篇。申請國家發(fā)明專利 8 項,授權(quán) 4 項。先后訪問美國德州大學圣安東尼奧分校、澳大利亞皇家墨爾本理工大學、香港大學等進行學術(shù)交流和合作。擔任國際 SCI 刊物 Asian Journal of Control、International Journal of Advanced Robotic 等客座編委。現(xiàn)為 IEEE Senior Member,中國人工智能學會智能空天系統(tǒng)專業(yè)委員會委員、中國指揮與控制學會網(wǎng)絡科學與工程專業(yè)委員會委員。
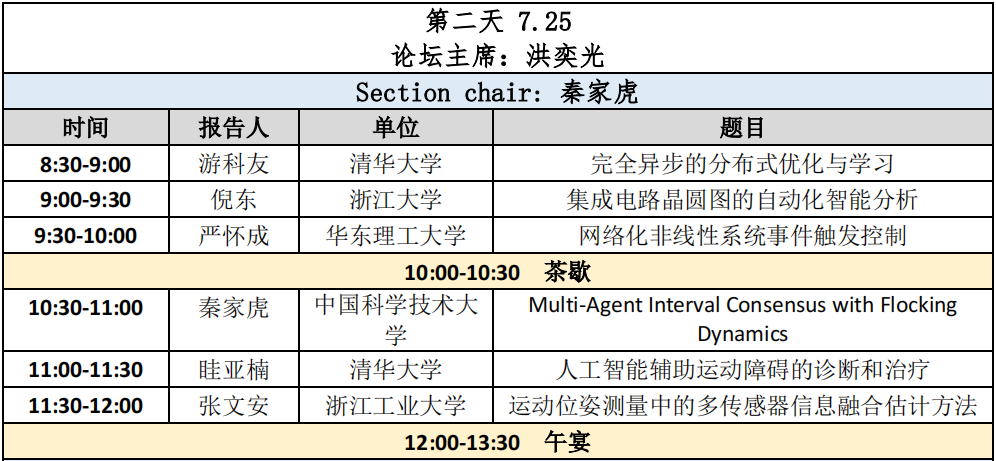
7月25日

游科友
清華大學
長聘副教授
報告題目:完全異步的分布式優(yōu)化與學習
報告時間:8:30-9:00,7.25
報告簡介:
自動控制和機器學習中的許多研究熱點問題均可表示為數(shù)學優(yōu)化。隨著數(shù)據(jù)集的規(guī)模變大以及分散程度變高,分布式框架可以更可靠、更高效地求解優(yōu)化與學習問題。但現(xiàn)有分布式算法需要節(jié)點間的同步協(xié)作,這極大地限制了算法的應用以及計算效率。本報告首先提出了單個節(jié)點可在任意時刻進行局部更新的完全異步分布式計算方法;其次,針對分散數(shù)據(jù)集與傳輸延遲有界的有向通信網(wǎng)絡,設計了完全異步的分布式梯度跟蹤算法,并在目標函數(shù)為強凸和 Lipschitz 光滑的情況下證明了算法的線性收斂速率。最后,數(shù)值實驗驗證了所提算法的優(yōu)越性。
報告人簡介:
游科友,清華大學自動化系長聘副教授、博士生導師。2007 年獲中山大學統(tǒng)計科學學士學位。2007 年 8 月至 2012 年 6 月在新加坡南洋理工大學電氣與電子工程學院攻讀博士學位和從事博士后研究。自 2012 年 7 月起任教于清華大學自動化系。曾受邀訪問意大利都靈理工大學、澳大利亞墨爾本大學、香港科技大學等院校。長期從事復雜網(wǎng)絡化系統(tǒng)的學習、優(yōu)化與控制及其應用的研究。目前,擔任 IEEE Transactions on Cybernetics、IEEE Transactions on Control of Network Systems、Systems & Control Letters、IEEE Control System Letters 等國際期刊副編委(Associate Editor)。先后主持國家自然科學基金委優(yōu)青項目、重點項目、重點研發(fā)計劃課題等,獲關肇直最佳論文獎、亞洲控制學會淡馬錫青年教育學者獎。

倪東
浙江大學
教授
報告題目:集成電路晶圓圖的自動化智能分析
報告時間:9:00-9:30,7.25
報告簡介:
集成電路晶圓圖是集成電路制造過程中最為關鍵的生產(chǎn)數(shù)據(jù)之一,是集成電路芯片在制造過程中的質(zhì)量指標結(jié)合其在晶圓上的測量位置的綜合呈現(xiàn)。有效且及時的對集成電路晶圓制造過程中產(chǎn)生的晶圓圖數(shù)據(jù)進行分析,能極大的促進生產(chǎn)過程的質(zhì)量管理與良率提升,是集成電路制造過程最為重要的數(shù)據(jù)分析任務之一。本報告介紹了本團隊應用深度學習方法在晶圓圖分析中提出的一系列自動化智能分析技術(shù),并對該領域的發(fā)展前景做出了展望。
報告人簡介:
倪東,浙江大學控制科學與工程學院教授、博士生導師,美國加州大學洛杉磯分校博士,國家自然科學基金重點項目負責人、美國自動控制委員會最佳論文獎獲得者。曾任美國英特爾公司邏輯電路制程研發(fā)中心主任工程師、中國科學院自動化研究所研究員。現(xiàn)任浙江大學集成電路先導技術(shù)研究所副所長,中國自動化學會集成自動化專業(yè)委員會委員,工業(yè)控制技術(shù)國家重點實驗室成員。主要研究方向為多尺度系統(tǒng)與人工智能方法在集成電路、新能源等先進制造領域的智能制造應用。

嚴懷成
華東理工大學
教授
報告題目:網(wǎng)絡化非線性系統(tǒng)事件觸發(fā)控制
報告時間:9:30-10:00,7.25
報告簡介:
This talk will present challenges and some results on the concept of event-triggered control and filtering for networked nonlinear systems with limited network resources. The event-triggered control and filtering problem of networked nonlinear systems is investigated based on T-S fuzzy models. Some novel sufficient stability conditions are obtained and corresponding controllers are derived to ensure the desired performances. Moreover, some simulation results on practical systems are also provided to illustrate the effectiveness and superiority of the proposed method. Finally, some concluding remarks and future works will be presented.
報告人簡介:
嚴懷成,華東理工大學教授、博導。入選國家“萬人計劃”領軍人才、科技部中青年科技創(chuàng)新領軍人才、上海領軍人才、上海優(yōu)秀學術(shù)帶頭人、上海曙光學者及科睿唯安“全球高被引科學家”等。主要從事網(wǎng)絡化控制、多智能體系統(tǒng)、智能無人駕駛、機器人/無人機/航天器控制、網(wǎng)絡安全研究工作。主持國家自然基金及中央軍委裝發(fā)共用技術(shù)和領域基金等國家省部級課題 30 余項。參編英文專著 2 部,發(fā)表論文 200 余篇,SCI 論文 140 余篇, 其中在 Automatica 和 IEEE TAC 等 IEEE 匯刊發(fā)表論文 80 余篇,21 篇入選 ESI 高被引論文,11 篇入選 ESI 熱點論文。2 篇入選“中國百篇最具影響國際學術(shù)論文”,獲國內(nèi)外學術(shù)會議最佳論文獎 4 次。申請和授權(quán)國家發(fā)明專利 10 余項。現(xiàn)擔任 IEEE Transactions on Neural Networks and Learning Systems、International Journal of Robotics and Automation、IEEE Open Journal of Circuits and Systems 等多個國際期刊副編輯(Associate Editor)。獲教育部/上海市/中國自動化學會自然科學二等獎、中國人工智能學會 “吳文俊人工智能自然科學獎二等獎”等獎項 6 項。現(xiàn)為中國自動化學會控制理論專業(yè)委員會委員、中國自動化學會青年工作委員會常務委員、中國人工智能學會智能機器人專委會委員和上海自動化學會理事等。
