




為了推動智能優化與控制領域的學術交流,由中國自動化學會主辦、同濟大學電子與信息工程學院控制科學與工程系及上海自主智能無人系統科學中心承辦的YeS論壇(長三角地區)于2021年11月13-14日以線上形式圓滿召開。中國自動化學會會士、同濟大學洪奕光教授擔任本次論壇主席,中國自動化學會青托獲得者、同濟大學孟敏研究員擔任本次論壇組織主席。論壇有47位優秀青年專家參加本次論壇并作報告,兩天累計線上參會人數近800余人次。


論壇主席洪奕光教授致開幕詞,對本次論壇進行了隆重介紹,對參會嘉賓、老師和同學表示熱烈歡迎與感謝,同時提出應當把握大勢、搶占先機,鼓勵多學科交叉融合,開展基礎理論研究和科技攻關,希望本次論壇能夠促進在智能優化與控制前沿理論與技術等方面的交流與進步。
組織主席孟敏研究員對參會嘉賓、老師和同學表示了熱烈歡迎和感謝,并預祝本次論壇活動圓滿舉辦。同時對2021中國自動化大會進行了宣講,并邀請與會嘉賓共同錄制視頻,祝賀中國自動化學會六十周年生日快樂,砥礪前行,勇攀高峰!
13日上午,同濟大學李修賢研究員作為上半場主持,對上午的嘉賓們分別進行了隆重介紹。
第一位報告人為來自浙江大學的趙春暉教授,報告題目為“零樣本工業設備故障診斷研究”。報告中,為應對故障診斷無數據難題,建立了零樣本故障診斷遷移方法,通過巧妙引入以故障描述為載體的先驗建模知識,解決了故障診斷對樣本量約束難以滿足的瓶頸問題。
第二位報告人為來自山東大學的王光臣教授,報告題目為“An LQ differential game of stochastic large-population system with partial information”。介紹了極大值原理與最優濾波相結合的極限控制問題的最優控制方案,并證明了分散控制策略是一個博弈的納什均衡點。
第三位報告人為來自東南大學的溫廣輝教授,報告題目為“復雜信息物理網絡:從信息安全到安全控制”。報告討論了復雜信息物理網絡的網絡安全問題,重點介紹了安全通信、攻擊檢測和容錯控制。提出了一種新的有效的安全控制策略,以保證在復雜物理網絡中實現理想同步,防止對節點的惡意攻擊。
第四位報告人為來自北京航空航天大學的高慶教授,報告題目為“Approximation of a stochastic differential equation: An intuitive approach and improvement”。報告中介紹了隨機微分方程逼近的相關問題,解釋了SDE與ODE相關問題的不同,并介紹了SDE在其他領域中的應用。
第五位報告人為來自清華大學的孟子陽副教授,報告題目為“基于圖像識別的無人系統自主定位技術研究進展”。介紹了基于卷積神經網絡的遙感圖像匹配定位技術、在未知環境下同時定位與建圖方法、嵌入式平臺上實時視覺慣性里程計,以及同時定位、建圖與跟蹤技術。
第六位報告人為來自上海交通大學的殷翔副教授,報告題目為“Model predictive control of cyber-physical systems under complex temporal logic tasks”。介紹了一種基于預測控制的信息物理系統時序任務規劃方法,提出了一種基于時域分解的魯棒預測控制方法,保證了有限時域預測控制問題對全局邏輯任務的遞歸可行性,并通過移動機器人任務規劃等案例對方法的有效性進行了驗證。
第七位報告人為來自上海交通大學的何建平副教授,報告題目為“分布式網絡系統的狀態和結構安全”。報告從網絡系統動態狀態和結構安全角度出發,闡述分布式網絡系統在人工智能背景下的智能協同與安全方向的機遇和挑戰,以及課題組在該方向上的前期探索。
第八位報告人為來自浙江工業大學的張文安教授,報告題目為“面向移動物聯網可靠定位的信息融合估計理論與方法”。報告中,通過多傳感器信息融合將量測信息進行多層次、多時空的信息互補和優化處理獲得更高精度和更可靠的定位結果,介紹了在這一方面取得的一些最新研究結果,并探討該方向目前有待解決的問題。
第九位報告人為來自西安交通大學的楊在教授,報告題目為“Low rank optimization models for spectral compressed sensing”。報告中,討論了已有的低秩矩陣恢復算法,并指出其局限性,進而提出新的低秩優化模型解決這些局限性,并對未來的工作進行了展望。
第十位報告人為來自華東理工大學的嚴懷成教授,報告題目為“Event-triggered control of nonlinear networked systems”。介紹了有限網絡資源的非線性網絡系統的事件觸發控制和濾波方面的挑戰和一些成果。研究了基于T-S模糊模型的非線性網絡系統的事件觸發控制與濾波問題,得到了新的穩定性的充分條件。

13日下午,同濟大學孟敏研究員作為下半場主持,分別對下午的嘉賓進行了隆重介紹。
第一位報告人為來自東南大學的張亞教授,報告題目為“傳感器和執行器攻擊下系統的安全估計和控制”。報告中,討論了由多個傳感器節點和一個執行器組成的網絡化控制系統在傳感器和執行器受到虛假信息注入攻擊時的安全估計與控制問題。

第二位報告人為來自中國科學院數學與系統科學研究院的齊洪勝教授,報告題目為“Measurement-induced Boolean dynamics for open quantum networks”。介紹了在開放量子網絡的順序測量下測量結果的遞歸,證明了誘導布爾網絡的狀態轉移可以通過主方程的實現來顯式表示,并對量子一致性網絡作為一種非松弛的開放量子網絡進行了動力學分析。
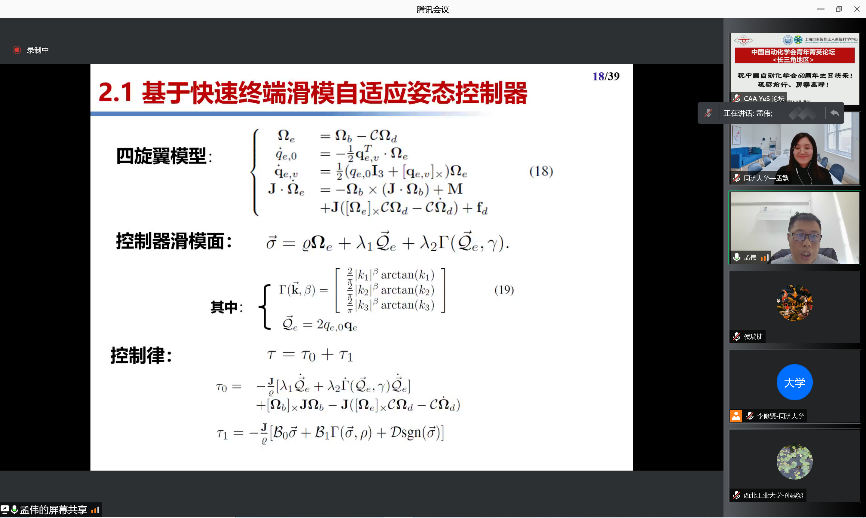
第三位報告人為來自廣東工業大學的孟偉教授,報告題目為“四旋翼魯棒飛行控制研究進展”。報告中介紹了課題組在旋翼無人機方面的研究進展,主要包括滑模控制在飛控中的理論和技術應用以及無人機數字孿生仿真方面的進展。
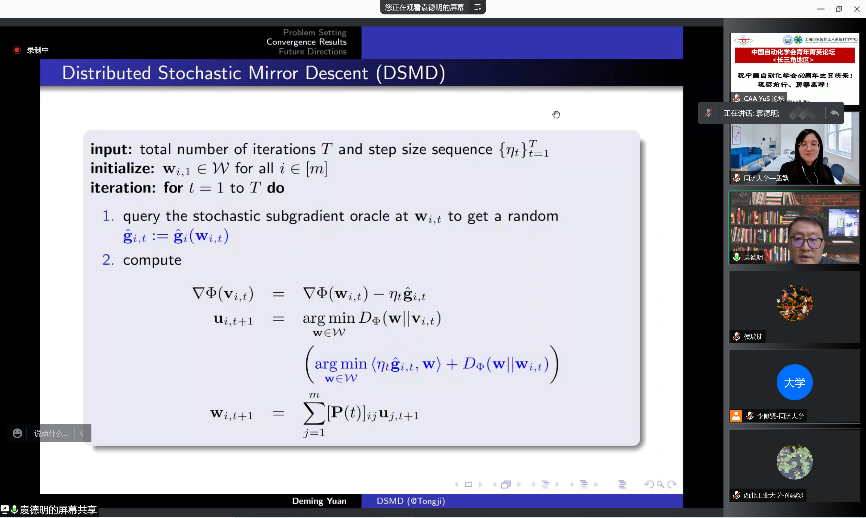
第四位報告人為來自南京理工大學的袁德明教授,報告題目為“Distributed optimization via multi-agent mirror descent”。介紹了具有約束集的隨機強凸優化在時變多智能體網絡上的收斂速度問題,提出了兩種有效的非歐幾里得隨機次梯度下降算法。
第五位報告人為來自西北工業大學的胡勁文副教授,報告題目為“無人機自主導航與協同控制”。報告主要探討了無人機的自主導航定位、障礙規避、分布式集群控制、作戰機動決策等問題,并介紹了相關的研究進展及未來發展。
第六位報告人為來自華東理工大學的唐漾教授,報告題目為“Event-based consensus of multi-agent systems”。報告中討論了在線性動力學、姿態動力學和安全控制方面,多智能體系統基于事件觸發的一致性方面的近期工作。
第七位報告人為來自北京理工大學的呂躍祖副研究員,報告題目為“Distributed protocol design for MASs: A PI-gain and attack-free perspective”。介紹了一種網絡攻擊免疫的協議設計思路,并探討了該方法的適用范圍。設計了分布式觀測器,在觀測器設計的基礎上,利用比例積分增益以設計完全分布式控制協議。

第八位報告人為來自西北工業大學的李慧平教授,報告題目為“Distributed model predictive control”。報告中首先介紹了分布式模型預測控制的研究背景和基本思想,然后介紹了通信噪聲下的分布式模型預測控制方法和理論,最后對相關工作進行了展望。
第九位報告人為來自山東大學的劉帥教授,報告題目為“Three operators splitting based proximal primal-dual algorithm for distributed non-smooth optimization with coupled constraints”。報告中,介紹了通過引入一種基于算子分裂的算法來有效地解決不平滑優化問題,同時給出固定步長的原對偶算法求解耦合約束下優化問題。
第十位報告人為來自北京理工大學的俞成浦教授,報告題目為“Inverse optimal control for LQR problems”。介紹了利用龐特里亞金最小原理將逆最優控制問題轉化為邊界條件激勵的參數化因果混合系統的辨識問題,并從系統模型本身出發給出了未知參數可辨識的充分條件及有關辨識問題的完美代數解。
第十一位報告人為來自清華大學的莫一林副教授,報告題目為“數據驅動的控制算法設計”。報告中首先針對常見的LQG控制,介紹了在模型參數未知的情況下如何同時解決系統模型參數辨識以及最優控制問題。另一方面,針對無人駕駛系統,提出了將容易精確機理建模的車體動力學部分與難以建立機理模型的輪胎-地面接觸模型進行分離。
第十二位報告人為來自浙江工業大學的劉安東副教授,報告題目為“基于視覺的移動機器人模型預測控制”。報告中,介紹了存在光照、模型參數等不確定因素影響下的視覺伺服控制系統,討論了如何提高在線優化速度來設計具有終端約束的魯棒預測跟蹤控制器和基于學習的預測鎮定控制器,并給出一些相關的研究進展。
第十三位報告人為來自浙江工業大學的陳博教授,報告題目為“資源約束下的網絡化分布式安全融合估計”。報告中針對資源約束下的網絡化融合估計問題,提出了一系列分布式融合估計方法,并從主動防御的角度提出了基于數據隱私保護的安全融合估計方法。
14日上午,南京理工大學張保勇教授作為上半場主持,對上午的各位嘉賓進行了隆重介紹。
第一位報告人為來自北京航空航天大學的董希旺教授,報告題目為“集群系統協同控制理論及在飛行器集群中的應用”。報告中主要針對集群系統協同控制中的分布式時變編隊控制技術、編隊跟蹤控制技術及編隊-合圍控制技術分別進行了簡要的介紹,并結合實例進行演示驗證,同時對未來的可能發展方向進行概述。

第二位報告人為來自東北大學的葉丹教授,報告題目為“具有完全隱蔽性的虛假數據注入攻擊研究”。報告中以CPS中檢測機制漏洞為出發點,討論了一類具有完全隱蔽性的FDI攻擊。這類攻擊可以使系統中的卡方檢測器和SUM檢測器的檢測率收斂于正常情況下的誤警率,進而可設計一種不依賴系統實時數據的自生成攻擊序列,驗證了完全隱蔽FDI攻擊的存在性。
第三位報告人來自為東北大學的劉騰飛教授,報告題目為“I型系統的反饋尋優”。報告中考慮當受控個體在已經具備基本的設定值跟蹤能力(I型)的基礎上,對于如何設計分布式的反饋優化律,使多個受控個體僅利用自身測量的梯度信息和個體之間的信息交換,最終趨近于整體最優目標點進行了較為詳細的總結。
第四位報告人為來自浙江大學的賀詩波教授,報告題目為“高速鐵路突發事件高效感知與理解”。報告中對高鐵運行過程中的大風預警進行分析和預測,針對三種不同情況提出了相應的預測方法,設計了動態的限速指令生成方案和自適應的報警解除方案,并通過多源數據融合的方法對異物侵限進行高效檢測,設計了輕量級易于終端部署的入侵檢測算法。
第五位報告人為來自華中科技大學的蘇厚勝教授,報告題目為“時變區間不確定下的多智能體一致性控制”。報告中通過對輸出反饋方法的描述,以正系統理論為主要依據,討論了具有時變區間不確定性和初始狀態未知的連續時間不確定多智能體系統的一致性問題。
第六位報告人為來自西湖大學的趙世鈺特聘研究員,報告題目為“無人機集群探測與追捕”。報告中介紹了西湖大學智能無人系統實驗室在惡意無人機追捕系統方面的工作,主要包括空對空無人機探測和追捕系統,包括無人機探測、目標運動估計、跟蹤控制等系統開發等。
第七位報告人為來自北京航空航天大學的全權副教授,報告題目為“無人機蜂群控制:虛擬管道技術”。報告中對于采用集中式規劃“虛擬管道”和分布式“管道控制”相結合方式,約束無人機避免分散,并減少計算的問題進行了探討,初步回答了以下三個科學問題:如何定義及生成合理的虛擬管道及網絡;無人蜂群在虛擬管道及網絡滿足何種通行規律;針對虛擬管道及網絡,如何設計高效和魯棒集群控制算法。

第八位報告人為來自上海交通大學的李元龍助理教授,報告題目為“基于性能的抗飽和補償器設計”。報告分別從補償器的設計結構和激發機制兩個方面出發,探討了基于凸包分區的切換抗飽和補償器結構,以及基于性能的抗飽和補償器激發機制,提出兩種新型抗飽和補償器設計方法,并給出相應的參數求解算法。
第九位報告人為來自合肥工業大學的都海波教授,報告題目為“四旋翼無人機有限時間控制方法研究”。報告中主要介紹了基于機器視覺的無人機室內定位系統,對視覺定位系統的模型參數進行自動尋優,可以替代人工標定以獲得更高的校準精度。
第十位報告人為來自阿里巴巴達摩院的袁坤博士,報告題目為“DecentLaM: Decentralized momentum SGD for large-batch deep training”。報告對當前深度學習研究與應用面臨的問題進行了分析,基于已有問題開展了分布式的深度學習算法研究,并將所提出的分布式深度學習方法與集中式方法進行了比較。
第十一位報告人為來自北京理工大學的劉坤特聘教授,報告題目為“Security and privacy of cyber-physical systems”。報告針對信息物理系統(CPS)的安全和隱私,設計了安全控制器以降低攻擊造成的損害,并提出了保護隱私的分布式優化算法和在線學習算法,利用不同的隱私機制對隱私信息進行保護。
14日下午,同濟大學李修賢研究員作為下半場主持,對下午的各位嘉賓分別進行了隆重介紹。
第一位報告人是來自廣東工業大學的吳元清教授,報告題目為“自主無人系統群智控制”。報告中針對自主無人系統存在的科學問題,設計了自主無人系統的機械設計、加工制造、電路板設計、集成組裝4個流程,并將算法應用于智能無人巡邏車及機械狗。
第二位報告人為來自東南大學的許文盈副教授,報告題目為“面向聯合錯誤數據注入攻擊的網絡化系統狀態估計問題研究”。報告中針對聯合錯誤數據注入攻擊下的網絡模型,討論了狀態估計問題中的安全問題,通過建立一種攻擊序列使估計殘差趨于無窮。
第三位報告人為來自東南大學的楊紹富副教授,報告題目為“An event-triggered distributed generalized Nash equilibrium seeking algorithm”。報告中結合了偽梯度投影動力學及一致性算法,提出了一類基于部分信息和事件觸發通信機制的完全分布式廣義納什均衡點的求解算法。
第四位報告人為來自中國科學技術大學的馬麒超副研究員,報告題目為“Multi-agent interval consensus with flocking dynamics“。報告中討論了具有群集動力學的多智能體網絡的區間一致性,針對兩種區間約束分別討論了平衡點問題。
第五位報告人為來自南京郵電大學的丁磊教授,報告題目為“A survey of distributed event-triggered communication and coordinated control for multi-agent systems”。報告針對多智能體系統的分布式事件觸發通信與協同控制的研究現狀進行了綜述,介紹多智能體系統協同控制的背景和事件觸發機制的基本框架,回顧了文獻中已有代表性的研究成果和方法,討論了多智能體系統的分布式事件觸發通信和協同控制的幾個具有挑戰性的研究問題。

第六位報告人為來自東南大學的王翔宇副教授,報告題目為“受擾多智能體系統抗干擾分布式優化方法研究”。報告中深入探討受擾多智能體系統的抗干擾分布式優化問題,并介紹報告人在該領域的研究成果,包括受擾多智能體系統的漸近、有限時間抗干擾分布式優化方法等幾個方面。
第七位報告人為浙江大學的徐金明研究員,報告題目為“Distributed optimization over networks: From algorithm to applications”。報告介紹了近期提出的幾種新型分布式優化算法,并講解了分布式優化算法在多傳感器信息融合、智能電網資源優化配置和分布式機器學習等諸多領域中的應用。
第八位報告人為香港中文大學(深圳)的濮實助理教授,報告題目為“Asymptotic network independence in distributed stochastic gradient methods”。報告對分布式隨機梯度下降算法與集中式梯度下降算法的性能進行了比較,并討論了分布式隨機梯度算法實現網絡化收斂速度的瞬態時間。
第九位報告人為浙江大學的孟文超研究員,報告題目為“高階非線性系統高效控制”。報告圍繞非線性系統的兩類主要問題進行了闡述,介紹了一種基于系統轉換的自適應控制方法,可解決傳統反步法帶來的維數災難問題,大大減少控制器設計的復雜度。
第十位報告人為來自香港中文大學(深圳)的吳均峰副教授,報告題目為“Observability and graph filter design”。報告中研究了有限脈沖響應(FIR)圖濾波器的完全分布設計問題,通過向節點引入可觀察圖頻率的概念證明了節點的輸出信號(觀察信號)僅包含其所謂可觀察圖頻率的頻譜成分,并從控制理論的角度揭示了節點對地磁光譜分量的可觀測性與其可觀測矩陣的秩相關。
第十一位報告人為北京航空航天大學的郭克信副教授,報告題目為“無人旋翼飛行器智能感知與抗干擾控制方法及應用“。報告基于Ultra-Wideband(UWB)感知,以提高多無人機感知的魯棒性,并針對幾個典型場景通過引入抗干擾控制和容錯控制來提高飛行安全性,提出了一種多無人機受干擾環境下的仿生安全控制方法。
第十二位報告人為來自中科深谷的甄圣超技術首席,報告題目為“基于模型設計(MBD)開發機器人”。報告主要分享了合工大智能院機器人團隊基于模型設計開發電機伺服、機器人控制器、協作機器人、移動機器人、移動作業機器人、雙臂機器人等產品與應用。
第十三位報告人為南京郵電大學的鄧超助理教授,報告題目為“一類異構信息物理系統的可靠安全控制及其應用”。報告圍繞一類異構多智能體系統框架下的信息物理系統,討論其可靠性、安全性問題。首先考慮系統設備層的可靠性問題,其次兼顧網絡通訊層遭受拒絕服務攻擊以及系統設備層出現故障的情況,最后給出了保證系統可靠性、安全性的控制方案。

本次論壇共47個主題報告,涵蓋了分布式優化、分布式協同控制、博弈、自主智能系統的感知與決策、網絡系統安全與隱私等前沿理論,以及智能無人機、多傳感器信息融合、設計開發機器人等關鍵技術,展現了理論創新與實際應用的緊密結合。
本次論壇受疫情影響,采用線上的方式舉行,報告過程和交流提問環節中,各位專家學者、產業大咖和師生們相互交流,研討氣氛濃厚,營造出良好的學術氛圍。本次論壇作為中國自動化學會成立六十周年主題活動之一,促進了分布式優化、控制、博弈、安全、自主智能無人系統相關技術的交叉與融合,為該領域青年學者提供了一個豐富的前沿學術交流平臺。
