




摘要:本文介紹了多智能體系統協同控制的概念及應用,通信限制下實際多智能體系統協同控制問題,給出了帶寬限制下的事件觸發/自觸發協同控制、傳輸比特率限制下基于量化通信的協同控制、數據丟包和通信延時下基于預測補償的協同控制這些常見的協同控制方法解決通信限制下多智能體系統協同控制問題。最后,對通信限制下多智能體系統協同控制未來的研究方向進行了展望。
關鍵詞:通信受限,多智能體系統,協同控制,事件觸發控制,自觸發控制,量化通信,數據丟包,通信延時,預測補償控制
1. 引言
多智能體系統是由一定傳感、計算、執行和通訊能力的個體組成,各個單元通過網絡傳遞信息,互相協作完成任務。多智能體系統的應用研究非常活躍,其涉及領域較寬,這主要是由于系統的自主性、分布性、實時性等特點所決定的。多智能體系統協同控制已經成為控制學科的一個重要的研究熱點,其研究包括編隊、包圍、蜂擁和群集、跟蹤、一致等多個方面。多智能體系統協同控制已經應用于集群機器人、編隊飛行、智能電網、協同作戰、醫療診斷、協同制造、智能物流、無人艇編隊等各個領域,如圖1所示。
多智能體系統將通信、控制和計算與物理系統深度融合,是一種典型的信息物理系統。在多智能體系統中,通信網絡的傳輸比特率、通信帶寬、網絡資源等有限,隨著系統規模的擴大,網絡中傳輸的信息量也會增加,導致系統中容易出現通信延時、數據丟包等不良現象,這些不良網絡化現象導致接收信息不及時、不連續、缺失和不準確,降低了協同控制性能,甚至導致多智能體系統失穩,無法完成指定的任務。既然通信限制給多智能體系統協同控制帶來這么大的不利影響,如何從控制的角度克服通信限制帶來的不利影響?

圖1 多智能體系統協同控制應用領域
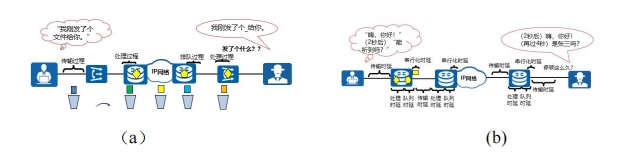
圖2 常見的不良網絡化現象(a)數據丟包 (b)通信時延[1]
2. 通信限制下多智能體系統協同控制
下面將給出幾種常見的協同控制方法解決通信限制下多智能體系統協同控制問題:
2.1 帶寬限制下的事件觸發/自觸發協同控制
事件觸發/自觸發控制只有當測量誤差超過指定閾值時,才觸發通信和控制更新,能夠有效降低通信和控制更新頻率,降低資源消耗和控制開銷,避免了連續頻繁通信造成的通信帶寬緊張,適合于通信帶寬有限的通信環境下多智能體系統協同控制。此外,事件觸發/自觸發控制能給多智能體系統控制帶來如下好處:首先,智能體中配備的測量模塊、通信模塊、微處理器、執行器模塊、驅動模塊等模塊消耗大量的能量,而給智能體提供的能量有限,使用事件觸發/自觸發控制能夠降低系統能量消耗,延長任務執行時間和系統壽命;其次,智能體的通信模塊、微處理器、執行器模塊具有有限的通信、計算和執行能力,事件觸發/自觸發控制能夠降低通信和計算量,降低控制開銷,使得智能體能夠執行所設計的控制方案;最后,當系統運行在穩態并且不受到干擾影響時,無需實時監視系統狀態、與鄰居智能體通信、以連續方式執行控制指令,事件觸發/自觸發控制可以節約通信資源,提升通信效率。我們在前期工作[2-3]給出了多智能體系統固定時事件觸發控制方案。典型的事件觸發控制方案如圖3所示[4]。
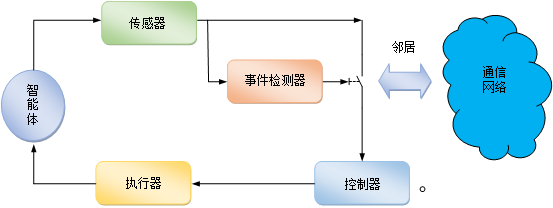
圖3 典型的事件觸發控制方案[4]
2.2 傳輸比特率限制下基于量化通信的協同控制
實際的多智能體系統通信網絡受到傳輸比特率的限制,無法傳輸實值信息。在受到傳輸比特率限制的多智能體系統通信網絡中,通常采用量化通信的方式傳遞信息,在發送端將實值信息量化為有限符號并進行編碼,以數字信號的形式傳輸信息,在發送端進行解碼,得到實值信息。這種通信方式具有強的反擁塞能力、高的安全性、易于實施和維護、強的魯棒性和遠距離傳輸等優點。然而,由于量化造成的不精確信息給協同控制協議的設計帶來了困難。我們在前期工作[5]中克服了這一困難,提出了基于量化通信的固定時一致性控制方法,實現了傳輸比特率限制下多智能體系統固定時一致性跟蹤,所設計的基于量化通信的控制方案如圖4所示。
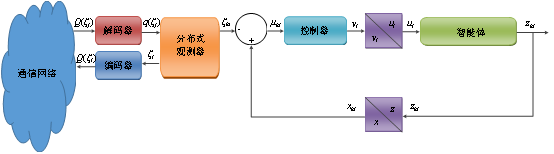
圖4 基于量化通信的協同控制方案
2.3 數據丟包和通信延時下基于預測補償的協同控制
實際的多智能體系統中,由于過飽和的通信連接、信道衰減、噪聲干擾、發射器和接收器之間過遠的距離、執行器故障、傳感器故障和網絡攻擊,容易發生數據丟包現象。數據丟包隨機改變通信拓撲,引入協同控制誤差,降低控制性能,甚至造成系統失穩。此外,在實際多智能體系統中,由于有限的通信容量和通信帶寬,當大量信息頻繁通過通信連接交互時,容易導致信息碰撞和信息重傳,進而導致通信延時。通信延時降低協同控制性能,甚至破壞多智能體系統穩定性。數據丟包和通信延時導致智能體無法及時收到實時信息,這給協同控制協議的設計帶來困難。針對網絡中出現的通信延時和數據丟包,我們在前期工作[6-7]中設計了一種預測器,預測在數據丟包和通信延時發生后,當前時刻鄰居智能體的狀態,設計了一種基于預測補償的協同控制方案,實現了數據丟包和通信延時下多智能體系統固定時一致性跟蹤,所設計的數據丟包和通信延時下基于預測補償的控制方案如圖5所示。

圖5 數據丟包和通信延時下基于預測補償的控制方案
3. 結論與展望
本文介紹了多智能體系統協同控制的概念及應用,通信限制下實際多智能
體系統協同控制問題,給出了帶寬受限下的事件觸發/自觸發控制、傳輸比特率限制下基于量化通信的控制、數據丟包和通信延時下基于預測補償的控制這些常見的協同控制方法解決通信限制下多智能體系統協同控制問題。通信限制下多智能體系統協同控制還有很多值得研究的方向,例如,基于編碼器-解碼器的動態事件觸發協同控制、隨機丟包環境下事件觸發協同控制、通信延時下量化協同控制、其他通信限制下多智能體系統協同控制。
參考文獻
[1] https://blog.csdn.net/dragon11123123/article/details/114853412
[2] J. K. Ni, P. Shi, Y. Zhao, Q. Pan and S. Y. Wang, “Fixed-time event-triggered output consensus tracking of high-order multiagent systems under directed interaction graphs,” IEEE Trans. Cybern., vol. 52, no. 7, pp. 6391-6405, Jul. 2022
[3] J. K. Ni, F. Y. Duan, P. Shi, “Fixed-time consensus tracking of multiagent system under DOS attack with event-triggered mechanism,” IEEE Trans. Circuits Syst. I, Reg. Papers, vol. 69, no. 12, pp. 5286-5299, Dec. 2022[4] L. Ding, Q.-L. Han, X. H. Ge and X.-M. Zhang, “An overview of recent advances in event-triggered consensus of multiagent systems,” IEEE Trans. Cybern., vol. 48, no. 4, pp. 1110-1123, Apr. 2018
[5] J. K. Ni, C. Y. Wen and Y. Zhao, “Fixed-time leader-follower quantized output consensus of high-order multi-agent systems over digraph,” Inf. Sci., vol. 587, pp. 408-434, Mar. 2022
[6] J. K. Ni, P. Shi, Y. Zhao and Z. H. Wu, “Fixed-time output consensus tracking for high-order multi-agent systems with directed network topology and packet dropout,” IEEE/CAA J. Autom. Sinica, vol. 8, no. 4, pp. 817-836, Apr. 2021
[7] J. K. Ni, Y. Zhao, J. D. Cao and W. L. Li, “Fixed-time practical consensus tracking of multi-agent systems with communication delay,” IEEE Trans. Netw. Sci. Eng., vol. 9, no. 3, pp. 1319-1334, May/Jun. 2022
科普作品簡介:
該論文介紹了多智能體系統協同控制的概念及應用,通信限制下實際多智能體系統協同控制問題,給出了帶寬限制下的事件觸發/自觸發協同控制、傳輸比特率限制下基于量化通信的協同控制、數據丟包和通信延時下基于預測補償的協同控制這些常見的協同控制方法解決通信限制下多智能體系統協同控制問題。最后,對通信限制下多智能體系統協同控制未來的研究方向進行了展望。
作者簡介:\
倪駿康,西北工業大學特任研究員,博士生導師。主要從事多智能體系統協同控制、信息物理系統容錯控制、固定時控制理論及應用等領域的研究。主持國家自然科學基金面上項目、國家自然科學青年基金、第八屆中國科協青年托舉工程項目、陜西省自然科學基金、裝備預研航天聯合基金等項目,在IEEE TCYB、IEEE TSMCA、IEEE TIE、ACC、IFAC World Congress等期刊和會議上發表論文50余篇,ESI高被引6篇,擔任CCC、IECON等多個國際會議執行主席、分會主席,擔任全國集群智能與協同控制大會、CSIS-IAC等會議的程序委員會委員。授權發明專利7項,軟件著作權2項,獲2021陜西省高等學校科學技術研究優秀成果二等獎,擔任中科院一區TOP期刊IEEE/CAA JAS青年編委,中國自動化學會和指揮與控制學會高級會員,擔任IFAC Technical Committee on Large Scale Complex Systems委員,擔任中國指揮與控制學會青工委委員、智能控制與系統專委會委員,擔任Automatica、IEEE TCYB、IEEE TSMCA、IEEE TFS、IEEE TIE等40余個高水平期刊審稿人,入選第八屆中國自動化學會青年人才托舉工程。
