




一、汽車駕駛的內涵
汽車駕駛本質上是對汽車運動的控制。無論是人工駕駛還是機器駕駛,駕駛的本質任務均未改變,即將汽車從位置A駛向位置B。在操作層面上,駕駛涉及油門、換檔、加速、自動等操作,即對汽車運動方向和驅動力的控制。對汽車運動進行控制需要滿足:以人為中心的安全舒適,其中安全是最重要的;以社會為中心的節能減排;以企業為中心的降本增效。顯然,這三個要求是沖突和矛盾的。
人類駕駛員駕駛汽車,首先是依靠視覺和聽覺感知周圍環境,還有通過身體感知車輛的振動和加速度等車輛運動狀態。因此,人類駕駛員對環境的感知并非僅僅依賴于視覺和聽覺,還融合了身體對運動姿態的感知。接下來,根據感知、經驗、記憶等信息理解環境,用腦完成轉向、加減速、擋位等決策。最后,通過手腳執行對方向盤、制動踏板、油門踏板和換擋的操作。
因此,汽車駕駛的自動化是對人類駕駛員感知、決策、執行各功能的增強或者替代。這里,對人類駕駛員執行功能的增強和替代已經在汽車領域得到廣泛應用,例如自動變速箱和自適應巡航系統。自動變速箱能夠實現前向行駛時的檔位操作的自主決策和執行,而自適應巡航系統能夠在有限范圍內自主進行加減速決策和執行。也就是說,汽車駕駛的自動化一直在進行中。
SAE(Society of Automotive Engineers)按照適用場景將自動駕駛技術分為L0-L5的等級,如圖1所示。實際上,從完全人類駕駛的L0,到解放雙腳的L1,以及解放雙手、解放雙眼、解放大腦,直至完全無人駕駛的L5,這些級別代表著對人類駕駛員感知、決策和執行功能增強或替代的程度。

圖1 自動駕駛分級
二、汽車駕駛的特征
汽車駕駛的特征包括以下幾個方面:首先,在運動動力學方面,汽車表現出高速、剛體、三維運動特性。例如,在轉向過程中乘坐者會產生外側傾斜感,油門踩得過猛會產生后坐感,行駛在不平路面上的垂向顛簸感。這里,一個更為重要的特征是復雜的輪地關系。汽車運動中,輪胎是汽車與地面唯一的接觸面,汽車的前進依賴于輪胎力的作用。不論是燃油車還是電動車,無論其控制系統如何,輪胎力是汽車運動的終極控制量。輪胎力在x-y-z三維坐標系中有6個分量,而所有控制系統最終都通過這6個量來影響汽車的運動。
輪地關系的復雜性源于輪胎與路面之間的唯一接觸面以及胎面和路面的多樣性。路面有瀝青、水泥、石子等不同材質,還有雨水、冰雪覆蓋等情況;輪胎的材質、充氣量和磨損等因素也對輪地關系有直接影響。此外,輪胎力呈現非線性特性,表現為輪胎力會飽和,即在某種程度上無法進一步增加。作為汽車運動的終極控制力,一旦達到飽和,就無法再產生有效的控制。在三維坐標系中,輪胎力飽和可以用一個錐形體來描述,投影在側縱(y-x)向上為橢圓型狀。
汽車駕駛的第二個特征表現在行駛環境即交通環境的開放性和異構性。交通環境中有不同的交通參與者,行人、摩托車、自行車和機動車等,這些不同類型的參與者使得交通環境具有開放性和異構性。另外,運行環境還受到天氣條件的影響,例如雨、雪、霧等不穩定天氣,這種多變的天氣狀況也增加了運行環境的開放性和異構性。
汽車駕駛的第三個特征表現在汽車系統層面。首先是以力矩為紐帶的動力產生、傳遞、使用過程中的機-電-液-熱反應動力學強耦合,如圖2所示。不論是燃油車還是新能源汽車,動力系統先將化學能或電能轉換為機械能,產生力矩。然后通過力矩傳遞和速度匹配,將動力傳遞至車輪,最終用于驅動車輛運動。如果系統還采用了能量回收技術,運動能將再次轉換為電能,進而進一步加重了動力學耦合程度。
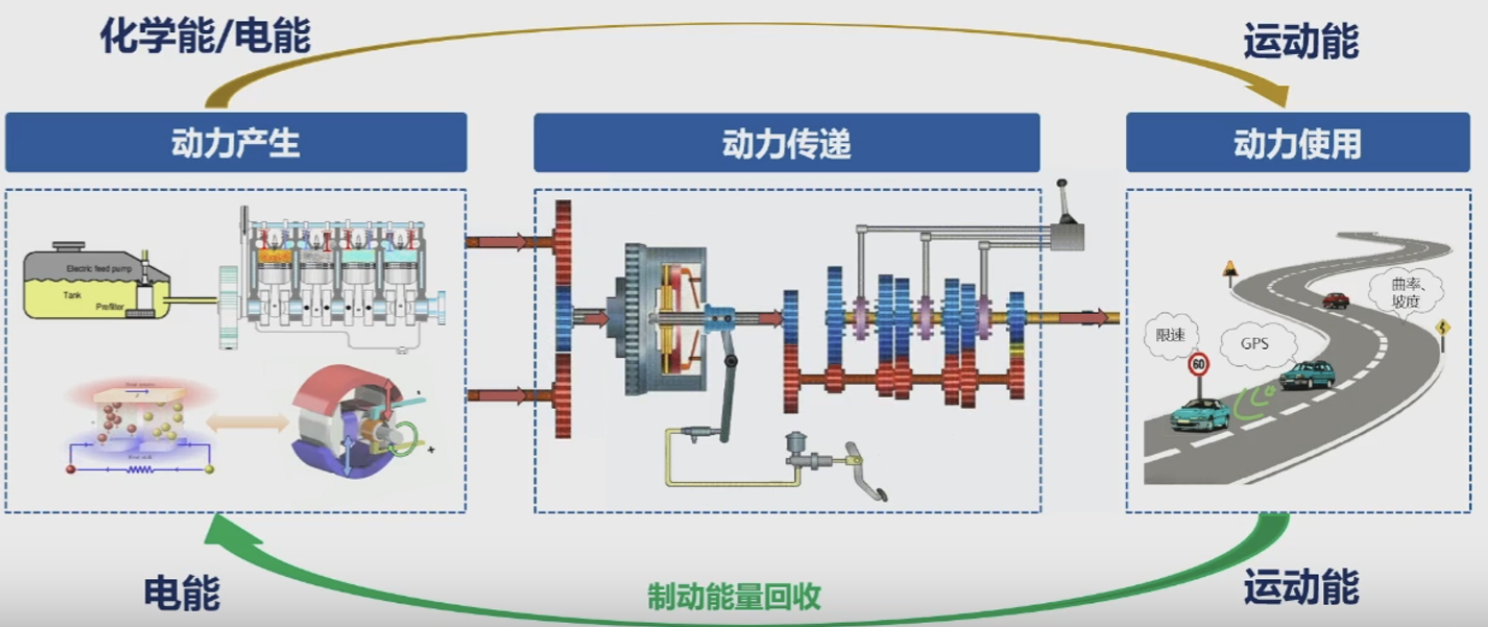
圖2 汽車動力產生過程
第二個系統特征涉及人在回路中的幾個方面。首先,駕駛員在回路中發揮著重要作用,他們具有多樣性,通常是非職業的個體,但又需要處理高速運動的汽車駕駛問題,這是需要考慮的重要特征。其次,乘員也在回路中扮演關鍵角色。汽車是以人為中心的產品,必須時刻關注乘員的安全感和舒適感。第三,人機博弈是人在回路的第三個方面。車輛運動只有一個主體,但控制車輛運動卻有兩個主體,一個是人類駕駛員,另一個是機器電腦也就是控制系統。人類駕駛員和控制系統設計的主觀意圖都想使汽車運動更好、更安全、更舒適。然而,現實可能是駕駛員和控制系統在爭奪駕駛權。最簡單的例子是電動助力轉向控制系統,如果參數調整不當,可能會產生方向盤“打手”現象。
另外一個系統特征是系統嵌套。汽車系統包括動力系統和運動系統。動力系統包括發動機系統和變速箱系統,而發動機系統又包含氣路、油路、點火系統和后處理系統等;運動系統中ABS,ESC、轉向系統也有類似的嵌套結構。在構建自動駕駛系統時,動力控制和運動控制又都成為了執行控制系統。這看似簡單,實際上是一個層層嵌套的系統結構。最外層是自動駕駛系統,通過相機、雷達等多模態感知信息構成反饋。
三、智能時代新技術
智能時代的技術特征:泛在感知、數據極大豐富,使得預測更準確;泛在計算、算力顯著提升,使得計算更快速,如圖3所示。比如,車載感知技術的不斷進步使得數據量大幅增加,從而提升了車輛軌跡預測的準確性。

圖3 智能感知
預測優化技術在提高數據準確性后,可以應用于預測安全、預測節能、預測減排等領域。預測安全的動因來源于2015年一次特大交通事故,由于車輛速度過快,在上坡道時無法完成需要的轉向,造成了重大人員傷亡的交通事故。基于道路的坡度、曲率數據,運用預測優化技術,能夠準確預測車輛的運動軌跡,從而及時對車輛進行主動轉向或制動,慘劇或可以避免。
在國家自然科學基金委員會重大項目等支持下,圍繞極限工況下汽車主動安全系統的建模、側縱垂運動一體化協同控制與測試評價展開研究。在這項工作中,我們考慮了不同車型不同驅動構型的應用場景,使得系統技術的拓展應用更加方便靈活。從控制架構優化、零動態失穩分析、穩定邊界描述,到一體化協同控制算法,全部技術自主可控。最后,在國家授牌測試場進行實車極限工況驗證,對控制系統及其算法完成了超過六輪次的迭代優化,通過釋放白盒代碼,支撐多家自主品牌車企實現了先進技術的自主與超越。
我們團隊在汽車智能技術方面的工作涵蓋多個方面,如圖4所示。首先是人機智能增強,包括機器對人類駕駛員的增強以及人對機器的增強,以期提升自動駕駛汽車的智能水平,實現機器駕駛與人類偏好“對齊”。其次,探索深度學習智能駕駛算法的可解釋性,確保駕駛決策的可靠性和安全性,以及評價不同等級自動駕駛汽車的駕駛智能度。最后,針對自動駕駛測評難題,創新了耦合多要素極限特性的實物在環高可信推演技術,自主研制了“軟件在環-硬件在環-單車在環-多車在環-實車在環”全鏈測試工具。這些研究旨在推進智能駕駛技術的發展和安全應用。
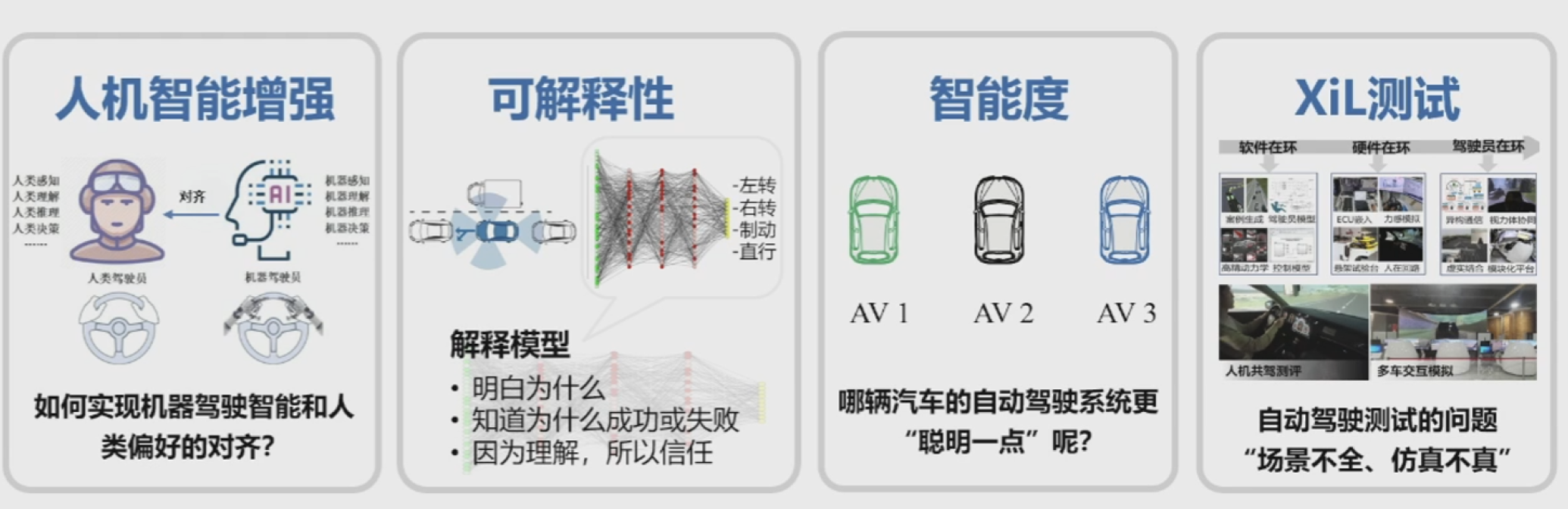
圖4 汽車智能技術
對自動駕駛而言,缺乏可解釋性導致決策難以理解,進而引發消費者和使用者的不信任。在解釋機器學習模型時,使用線性模型是最簡單的方法,因為其具有可解釋性,但其中最困難的部分是設計歸因函數。經濟學中,Shapley值可以用來衡量個體的貢獻,但將其應用于解釋機器學習算法時面臨一個基值問題,即如何確定基準值。為此,我們提出了一個TP基值的方案,計算個體Shapley值,保證獲勝團隊貢獻始終得到正面評價。最后,我們以DQN跟車決策模型為例,驗證所提出的可解釋性方法的有效性。
四、要點回顧與展望
汽車駕駛的本質是對汽車多自由度運動的控制,需要平衡以人為中心的安全舒適、以社會為中心的節能減排,以及以企業為中心的降本增效等三個相互沖突的要求。駕駛的自動化是對人類駕駛員感知、決策和執行等各項功能的增強或者替代。汽車駕駛系統的特征包括高速、三維運動、復雜輪地關系,開放、異構、多變運行環境,機、電、液、熱、反應動力學強耦合,人在回路,以及系統嵌套結構等。
數智時代,更多信息更快計算推動先進算法的車載應用,創造更多的新系統和新功能,賦能汽車社會更安全、更節能、更環保、更舒適。
